
Etter å ha blitt bitt av astro-basillen for alvor gikk interessen i retning astrofotografering. Det betydde at jeg måtte skaffe meg en ekvatorialmontering, enten med motor eller en som gikk an å motorisere. Valget falt på en skywatcher EQ5 med mulighet for å motorisere.

Det finnes ferdige løsninger med motorer som kan ettermonteres, men jeg valgte å bygge løsningen selv. Valget ble funnet på Onstep, der ligger ferdig oppskrift til prosjektet. Onstep er en gruppe på nettet som blant annet har beskrivelse av hvilken elektronikk og stepper-motorer som kan brukes, samt programvare for å få det hele til å fungere. Det finnes ASCOM-drivere for Onstep-monteringer, det er en stor fordel. ASCOM er universelle standarder for astronomi-utstyr, så alt som er ascom-kompatibelt kan “snakke sammen”. I mitt tilfelle hadde jeg lyst til å fotografere galakser, det betyr lange eksponeringstider og behov for guiding av teleskopet.
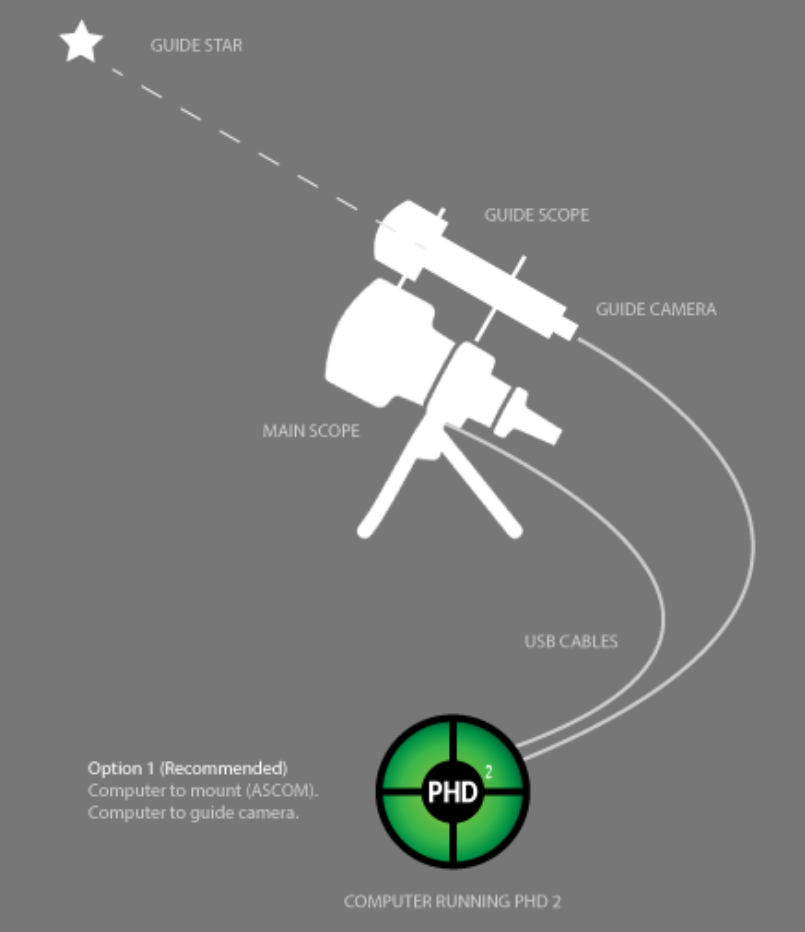
Selv om en motorisert ekvatorial-montering er programmert til å kompensere for jorden sin rotasjon, slik at objekter står stille i kamerasøkeren, så har alle monteringer små feil i mekanikken som gjør at de ikke er 100% nøyaktige. Guiding fungerer typisk ved at en har et eget guideteleskop med kamera montert på hovedteleskopet. Gudekameraet registrerer små feil i monteringen sin bevegelse og sender korreksjonssignaler til motorene på monteringen slik at stjernene forblir runde på bildet i hovedteleskopet. En mye brukt programvare til guiding er PHD2 (Press Here Dummy). Både guidekamera og selve monteringen kan kobles til en PC med usb-kabler, og ASCOM-drivere får det hele til å “snakke sammen”,
Kravet til nøyaktighet i guidingen er formidabelt. Hvis du tenker deg at to fullmåner ved siden av hverandre, så dekker de ca. en grad. Hver grad deles opp i 60 bueminutter, og hvert bueminutt i 60 buesekunder. En grad får da 3600 buesekunder. Hvis du skal få noenlunde skarpe bilder med et teleskop på rundt 1000 millimeter brennvidde, bør guidingen ligge innenfor ca. 1 buesekund, eller ca. 1:1800 del av fullmånen sin bredde. Det er ikke mye!
Deleliste til projektet:
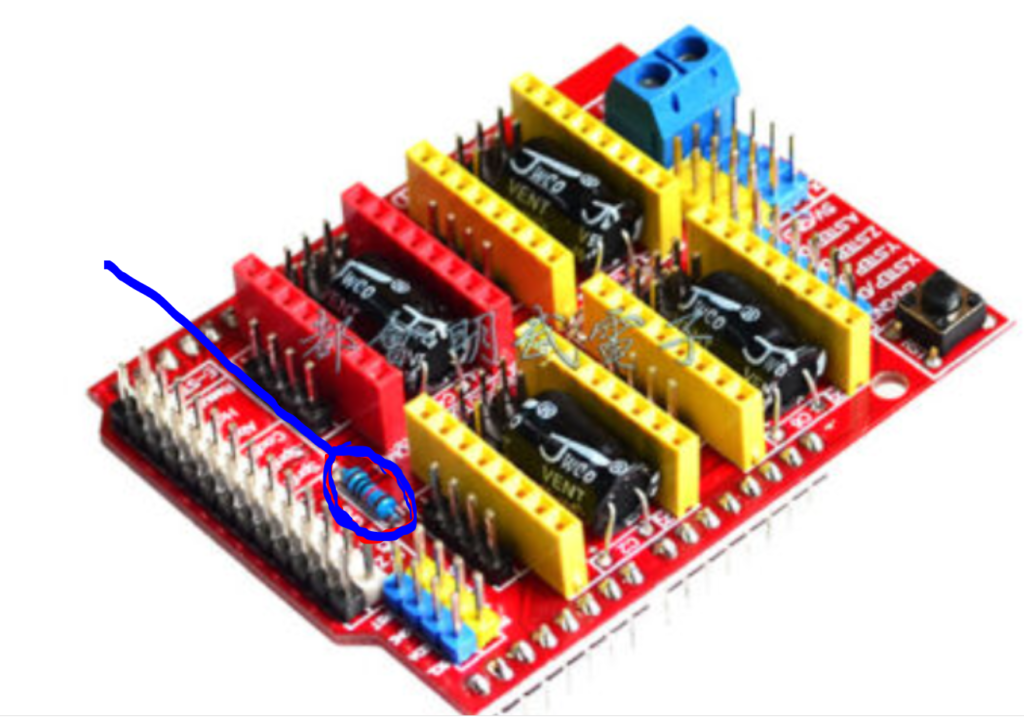
1 stk V3 CNC Shield Engraver A4988 3D Printer Expansion Board Driver For Arduino

1 stk ESP32 Wemos D1 UNO R3 R32 WIFI Bluetooth USB Type CH340 Devolopment Board

2 stk LV8729 Stepper Motor 4-layer PCB Driver w/ Heatsink Silent 3D Printer

2 stk GT2 2M 6mm Width Closed Loop Timing Belt Synchronous for Pulleys,3D Printer part, 77 teeth

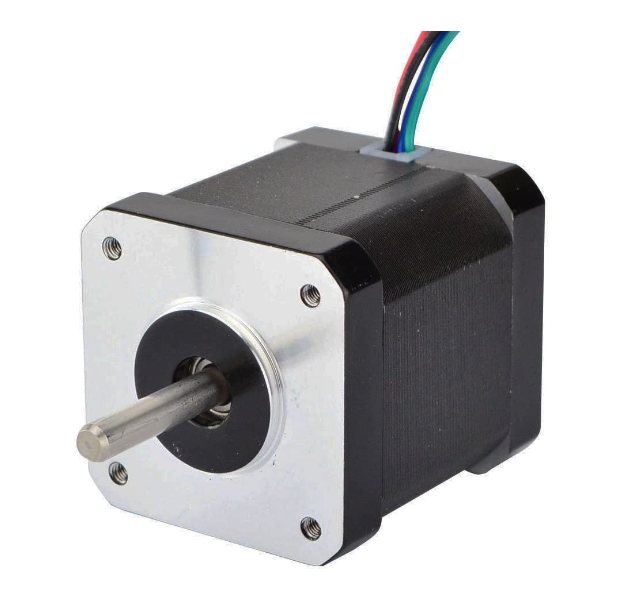
2 stk STEPPERONLINE 0.9deg Nema 17 Stepper Motor Bipolar 2A 46Ncm/65oz.in 42x42x48mm 4-Wires
2 sett Set GT2 Synchronous Wheel 20&60 Teeth 5mm Bore Aluminum Timing Pulley

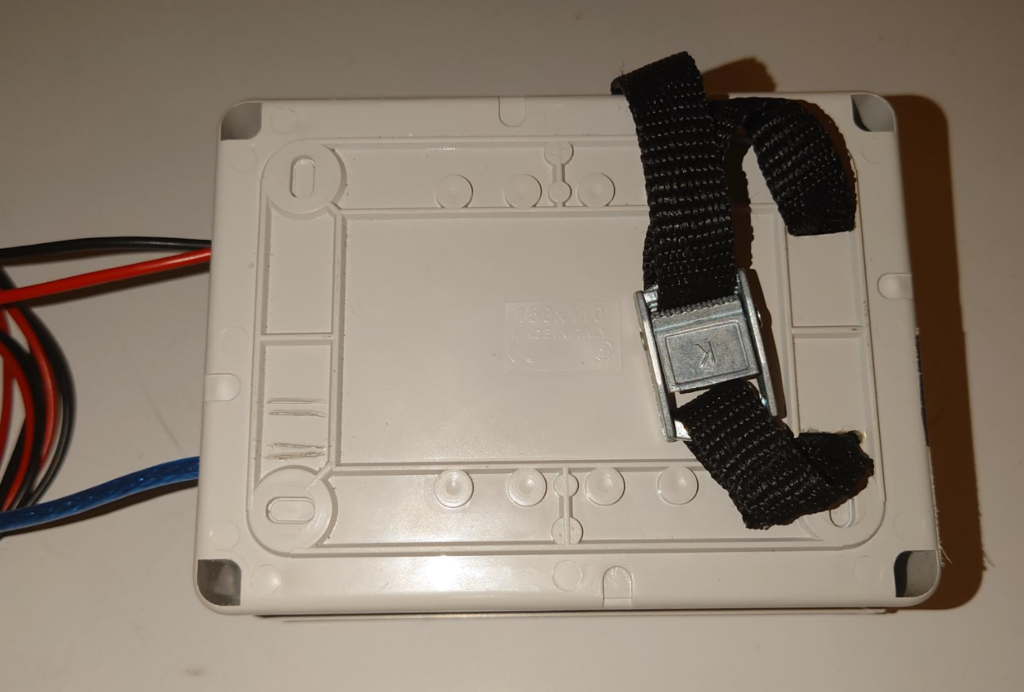
1 koblingsboks

For å programmere kortet, må du installere Arduino. Du finner spesifikk informasjon på Onstep sine sider om WeMos R32 with CNC V3 Shield og hvordan programmere denne enheten. I Arduino-programmet må du endre settingene i Config.h-filen. Her er en detaljert forklaring på hvordan settingene skal gjøres. Min Config.h-fil for dette prosjektetkan du laste ned her:
Min config.h-fil.
Inne i Config-filen finner du microstep-settingene for Akse 1 og 2. Jeg har brukt 32 mikrostep.

På kortet må du koble sammen pinnene under stepper-driverne tilsvarende antallet settingen i config-filen for å få 32 microsteps.
Det microstepping gjør er å øke antallet step motorene har for å få en finere bevegelse. I utgangspunktet har disse motorene 400 step, men ved å bruke 32 mikrostep blir antallet step for en omdreining 32×400= 12 800. Ulempen med microstep er at en mister kraft i motorene, men 32 step fungerer fint i dette tilfellet.
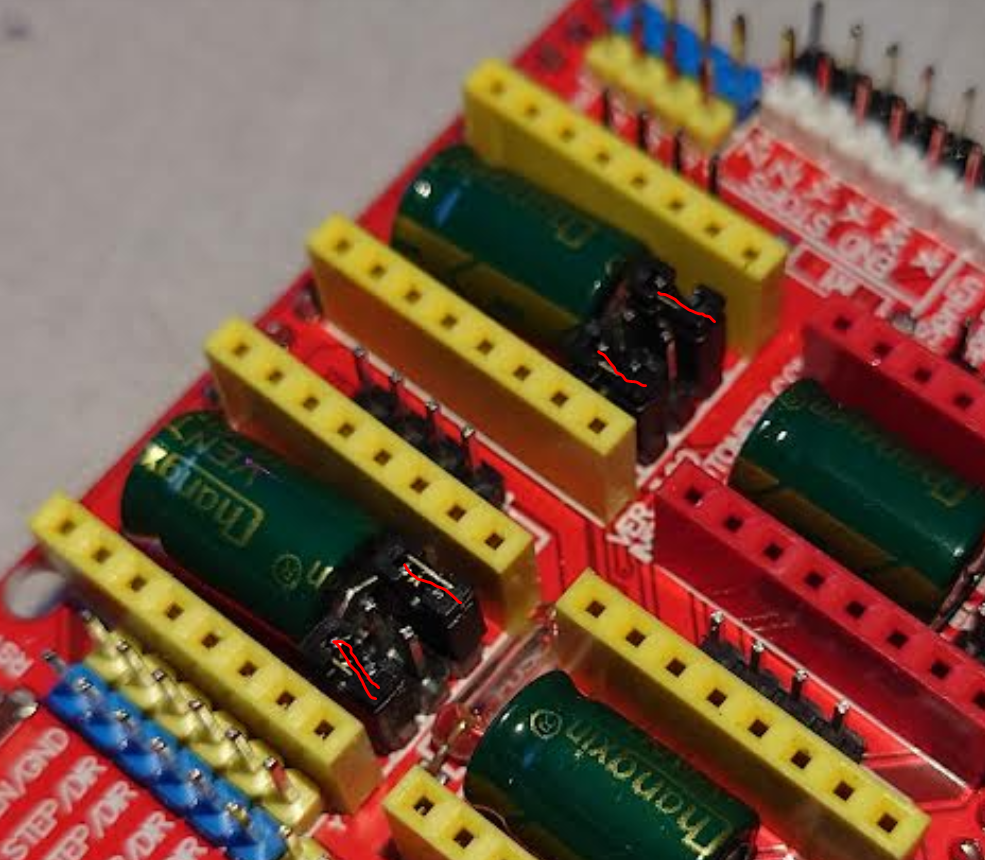
Koblede pinner er markert med røde streker.

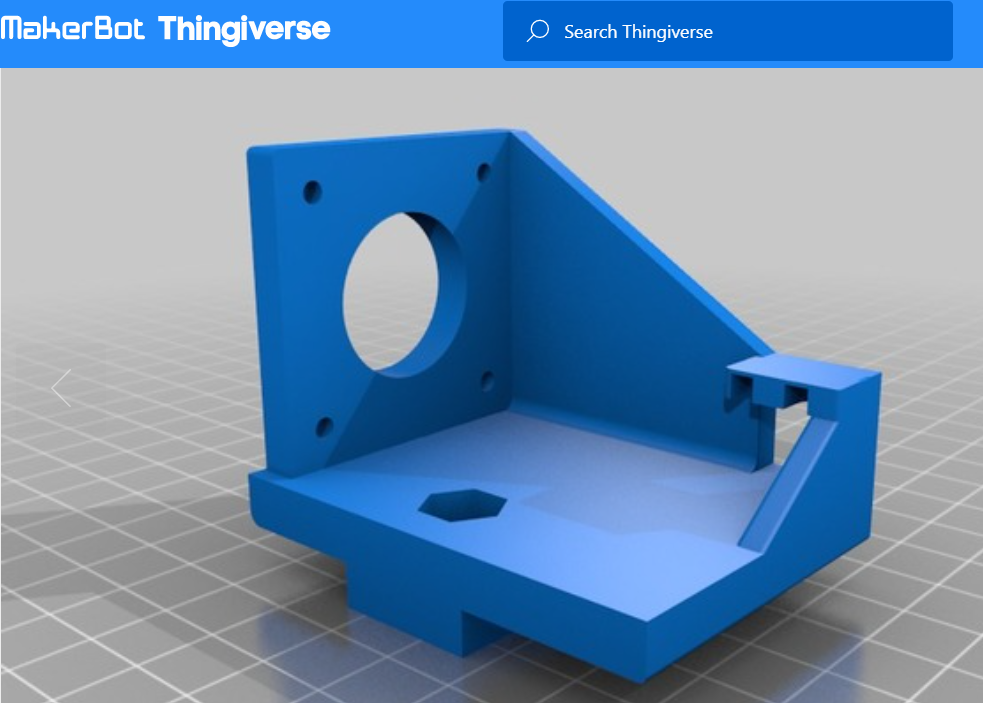
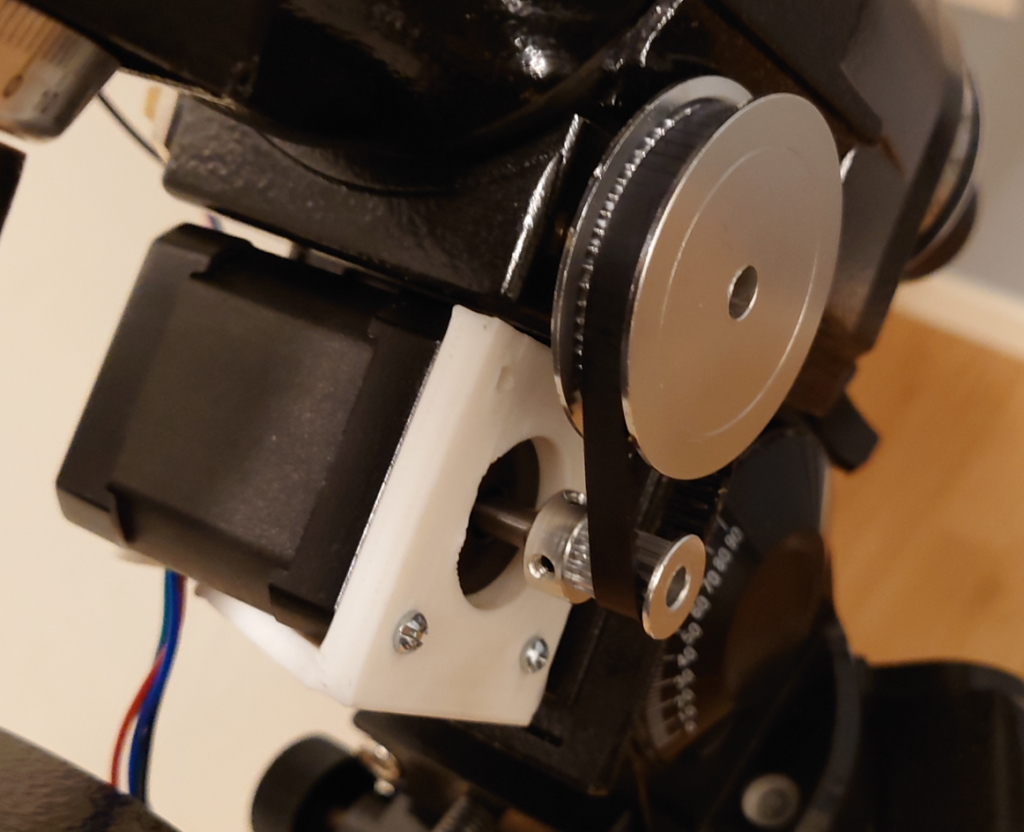
Holdere til steppermotorer kan 3d-printes, klikk for link til STL-fil.
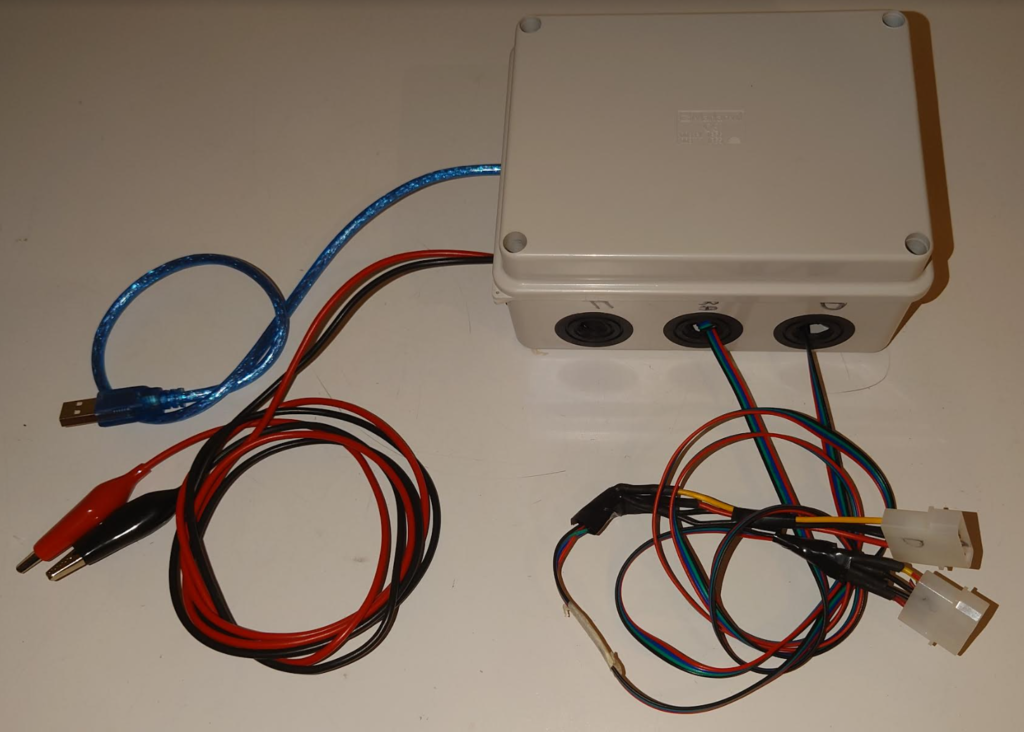
Ferdig montert motorstyring. USB-kabel, kabler til 12 volts batteri, kabler til de to steppermotorene. Kabelpluggene til motorene er hentet fra en gammel pc.

Erfaringer med prosjektet:
Så langt er jeg veldig fornøyd med styringen. Den er rask, og fungerer helt etter hensikten. I en periode hadde jeg montert en fokusmotor på 3. aksen, men ESP32 Wemos er ikke spesielt egnet til dette fordi den ikke slår av tomgangsstrømmen når fokusmotoren ikke er i bruk. Motoren jeg brukte (Nema 14) ble derfor veldig varm, og tok den derfor ut av bruk.Delekostnader til prosjektet er ca. en tusenlapp, så for den som har lyst til å gjøre dette, er det en billig vei til en god motorstyring.